端到端自动驾驶技术不断进化,纯视觉、真无图方案真的来了?
以谷歌设立自动驾驶部门为标志性事件,自动驾驶汽车已经走过15年的发展历程。近期,随着百度旗下“萝卜快跑”无人出租车的爆火、特斯拉FSD(全自动驾驶功能)在华落地的临近,自动驾驶公司纷纷加码端到端技术,行业有望跨入高速发展的新阶段。
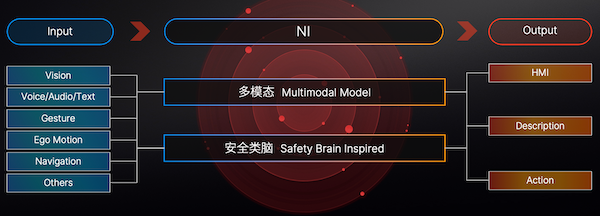
7月16日,Nullmax正式推出新一代自动驾驶技术Nullmax Intelligence(简称“NI”)。新技术由一个多模态的端到端大模型,加上一个安全类脑组成,着重于打造全场景的自动驾驶应用,是一套纯视觉、真无图的自动驾驶解决方案。
近年来,汽车智能化程度快速提升,智驾应用场景逐步扩大,高阶功能向城市加速渗透。但是由于重规则、泛化差、成本高、开不好等问题,智能驾驶的普及受到限制。但随着AI大模型技术的引进和发展,基于纯视觉方案的端到端自动驾驶技术因为能很好地解决上述痛点,成为了这场汽车智能化变革的主浪潮。
但如果仅仅是端到端技术,即便是加上多传感器如激光、毫米波等,也很难实现非常智能化的自动驾驶,Nullmax创始人兼CEO徐雷在接受第一财经记者采访时表示,这其中一定要包含多模态能力的大模型。
因为完全基于视觉的端到端自动驾驶技术不具备传统自动驾驶系统的“透明性”,传统自动驾驶是模块化方法,端到端自动驾驶是一体化方法,不产生中间结果,只要输入原始数据就可以输出最终结果,存在黑盒、解释性差的问题。
为了解决上述难题,徐雷表示,NI在视觉基础上,增加了对声音、文本、手势等信息的输入支持,通过多模态的端到端模型进行任务的推理,并构建了基于类脑神经网络的安全类脑,由系统整体输出可视化结果、场景描述和驾驶行为。这种架构设计,使得NI可以像人类一样,根据接收的图像、声音、文字等各种信息进行思考,同时也具有“趋利避害”的生物本能。
除此之外,NI并不依赖激光雷达、双目相机、大算力以及各类地图,这让其成本可以控制在小几千元范围内,更加适合普及应用。据悉,基于NI,Nullmax计划2025年实现全场景智驾应用的落地。
火山引擎汽车行业总经理杨立伟也在今年的中国电动汽车百人会上表示:“随着模型能力的迭代,以及模型从语言模型逐渐变成一个加上生成、加上多模态理解的能力,我相信在今年年底到明年可能会有质变的产生。”
目前,根据国内头部乘用车自动驾驶企业已经公布的方案,预计端到端自动驾驶将在2024年~2025年密集上车,包括华为、小鹏、元戎启行、商汤绝影等。在商用车方面,零一汽车也公布了相关规划,预计在2025年初实现端到端大模型上车,在2027年中实现大规模商业化落地。
万达集团回应“19亿股权被冻结”:正通过法律途径申诉
万达集团表示,此次冻结万达商管19亿股权,大幅超过双方财务纠纷金额。6月8日,据万达集团官网消息,针对“大连万达商管19亿股权被冻结”报道,万达集团发布声明如下:一、万达地产集团和某企业在长春一大型项目有合作,至今双方仍存在约10余亿元财务纠纷。0000英国监管机构出手!微软687亿美元收购动视暴雪案遇阻 动视暴雪盘前跌11%
自去年1月微软宣布将以687亿美元现金收购动视暴雪以来,这笔交易面临重重阻碍。4月26日,英国反垄断监管机构竞争和市场管理局(CMA)表示,已阻止微软收购动视暴雪的交易,原因是担心此交易会损害云游戏市场的竞争秩序,导致创新性下降,未来游戏玩家的选择变少。受此消息影响,动视暴雪美股盘前跌11%;截至发稿,微软美股盘前涨超7%。据媒体报道,微软表示仍将致力于支持此次收购,并将提出上诉。锤子财富2023-04-26 20:27:330000谋求向AI转型,思科新财年首份季报环比增长
北京时间11月14日,思科(CSCO.O)发布新财年的一季度财报。财报显示,该季度的营收138.41亿美元,环比上升1.45%,同比减少6%。净利润27.11亿美元,环比上升25%,同比下降25%。北京时间11月14日,思科(CSCO.O)发布新财年的一季度财报。财报显示,该季度的营收138.41亿美元,环比上升1.45%,同比减少6%。净利润27.11亿美元,环比上升25%,同比下降25%。锤子财富2024-11-17 02:41:030000AI如何加速新冠疫苗研发?多篇前沿论文揭示瓶颈与挑战
“AI技术的介入可以结构预测、序列优化等多个场景发挥作用,但更多的还是要在后续试验中去进行验证。”当下,AI正在为疫苗的加速研发提供更多方案。0000独董新规显威:离职人数创新高,独董生态有了新气象
独董进一步切实履行自身责任在证监会2023年8月4日发布《上市公司独立董事管理办法》(下称“独董管理办法”)之后,A股市场独董生态迎来怎样的变化?东方财富Choice数据显示,截至4月27日,2024年初以来A股上市公司独立董事离职人数达到846人,创下了历年同期独立董事离职人数的新高。业内人士认为,“独董管理办法”是其中重要影响因素。锤子财富2024-05-07 11:01:030000